
Dr.Zhiqing Li
Professor, Master Supervisor,
Email: lizhiqing@mail.buct.edu.cn
Background
Professor Li majored in Mechanical and Electronic Engineering and received Ph.D. degree in 2011, the State Key Laboratory of Robotics, Shenyang Institute of Automation, Chinese Academy of Sciences. From January 2011 to September 2011, he was a lecturer in State Key Laboratory of Industrial Process and Automation, Northeastern University. From September 2011 to February 2013, he engaged in the development of " mining automatic transportation equipment“, which is the subsystem of "green coal mining system project". He was responsible for the demonstration and development of mining robot and intelligent equipment system of Shenhua Group Company. From March 2013 to March 2019, he was a senior engineer in the Second Research Institute of China Aerospace Science and Industry Corporation. He undertook the research and development of ground intelligent system of various space product models, intelligent equipment of various space products during the 12th Five-Year Plan and the 13th Five-Year Plan, space robot, satellite solar wing deployment mechanism, satellite antenna deployment mechanism and other products. From April 2009 till now, he has been a Professor in Beijing University of Chemical Technology, China. He has undertaken or participated in 3 national vertical projects, 8 horizontal projects for central enterprises, 3 special horizontal projects, 6 independent projects, and developed more than 20 kinds of robots and intelligent equipment.
Areas of Research of Expertise
mobile robot technology and theory
aviation / aerospace intelligent equipment system integration technology
industrial process special robot system integration technology,
bionic robot technology
underwater special robot system integration technology
Memberships
Member of the fifth Computer Communication Professional Committee of the China Coal Society of the Ministry of Emergency Management
Teaching
Undergraduate Teaching
Introduction to mobile Robot
Introduction to Robotics
Robotics
Postgraduate Teaching
Introduction to mobile Robot
Introduction to Robotics
Robotics
Research
Funded Research Projects
The National Natural Science Foundation of China:
Mars rotor craft attitude control
Aerospace Science and Industry Group Project:
A quick-opening device
Space-based XXX technology development
Others:
Design and development of ship cleaning ROV robot
Design and development of an underwater intelligent cleaning robot with visual detection function
Development of machine hand marking and grinding system for billet surface defects
The Archive service robot
Manufacturing and integration of intelligent split shear pilot equipment in the head and tail of high wire coil
Integration and implementation of billet surface defect marking and grinding equipment
Manufacturing and integration of the autonomous pipe climbing mechanism and its auxiliary equipment
Development of portable detection equipment technology for defect detection of polyurethane thermal insulation layer
Publications
Yingzi Chen, Zhiqing Li*, Longchuan Li, Shugen Ma, Fuchun Zhang, Chao Fan;An anti-drone device based on capture technology[J]. Biomimetic Intelligence and Robotics. Volume 2, Issue 3, 2022, 100060, ISSN 2667-3797.
Yanran Chen,Zhiqing Li∗,Shugen Ma,Longchuan Li,Yulin Yang;CSA-SVM method for internal cavitation defects detection and its application of district heating pipes[C]. 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems(IROS).
Zhifeng Liu,Zhiqing Li∗, Shugen Ma; A Steel Billet Crack Marking System: Design And Implementation[C],2022 International Conference on Service Robotics (ICoSR 2022).
安晓松,李智卿*,马书根,王瑞琳,刘阳,祝华英; 水下蛇形机器人关节旋转机构建模及运动分析[J]. 传感器与微系统.2022
Xinyue Wang, Zhiqing Li*, Shugen Ma, Yingzi Chen, Zhifeng Liu; A Navigation and Positioning Method for Indoor Mobile Robots[C]. IEEE ICSMD2021.
Ruilin, Zhiqing Li*, Shugen Ma, Xiaosong An; Development of an underwater detection robot[C]. IEEE ICRAIC 2021.
Zheng Tang, Zhiqing Li*, Shugen Ma, Yanran Chen, Yulin Yang; Structure Design of Adaptive Pipeline Detection Robot[C]. IEEE ICCAR 2021
Tong Wu, Zhiqing Li*, Shugen Ma, h Zheng Tang;Trajectory Tracking Design of Multi-robot Formation Based on Leader-Follower[C]. IEEE CRC 2021
李智卿, 马书根, 李斌, 王明辉, 王越超. 具有自适应能力轮-履复合变形移动机器人的开发[J]. 机械工程学报. 2011.47(5):1-10 (EI)
李智卿, 马书根, 李斌, 王明辉, 王越超.具有自适应能力的轮-履复合变形移动机器人的移动机构与地面约束关系分析[J]. 中国科学 E辑: 技术科学. 2011,41(3):276-291
Zhiqing Li, Shugen Ma, et al. Analysis for the constraint relation between the ground and the self-adaptive mobile mechanism of a transformable wheel-track robot [J]. Sci China Tech Sci, 2011.54(3):610-624. (SCI: 724RN, EI: IP51262493)
李智卿, 马书根, 李斌, 王越超, 王明辉. 轮-履复合可变形机器人的移动机构参数分析[J]. 中国机械工程, 2009, 20(19): 2320-2326.
Zhiqing Li, Shugen Ma, Bin Li, Minghui Wang, and Yuechao Wang. Design and Basic Experiments of a Transformable Wheel-Track Robot with Self-adaptive Mobile Mechanism [C]. in Proceedings of IEEE/RSJ 2010 International Conference on Intelligent Robots and Systems (IROS 2010). IEEE, 2010: 1334-1339.
Zhiqing Li, Shugen Ma, Bin Li, Minghui Wang, and Yuechao Wang. Parameters of the Drive System for a Transformable Wheel-Track Robot with Self-adaptive Mobile Mechanism [C]. in Proceedings of IEEE International Conference on Robotics and Biomimetics (Robio 2010). IEEE, 2010: 339-344
Zhiqing Li, Shugen Ma, Bin Li, Minghui Wang, and Yuechao Wang. Kinematics Analysis of a Transformable Wheel-Track Robot with Self-adaptive Mobile Mechanism [C]. in Proceedings of IEEE International Conference on Mechatronics and Automation (ICMA 2010). IEEE, 2010: 1537-1542
Zhiqing Li, Shugen Ma, Bin Li, and Yuechao Wang, Minghui Wang. Parameter Design and Optimization for Mobile Mechanism of a Transformable Wheel-Track Robot [C]. Proc. IEEE Int. Conf. on Automation and Logistics. 2009. Shenyang, China. IEEE, 2009: 158-163.
Achievements of Robots and Intelligent Equipment
1. Aerospace Intelligent Equipment
Exploratory research and engineering development have been carried out according to the needs of equipment technology in the aviation and aerospace field, such as research on attitude control technology of Mars rotor aircraft, space special application technology, space super redundant robotic arm grasping technology, technology research on space folding mechanism, etc.

Posture control technology for Mars exploration


Hyper redundant robotic arms for spatial applications
2. Underwater robotics technology
With the overall goal of building a multi-dimensional intelligent robot detection system facing the ocean, we will carry out key technology research and breakthroughs in core technology, and gradually form a multi-dimensional intelligent robot detection system that covers the whole region of today.
(A) A Single Underwater Robot Platform for Underwater Inspection Tasks
The single underwater robot is mainly used for underwater detection, inspection and other tasks, and its functions can be expanded according to the actual needs. At present, the design index is the underwater depth index of 50 meters, which can be expanded to 1,000 meters underwater according to the actual demand.

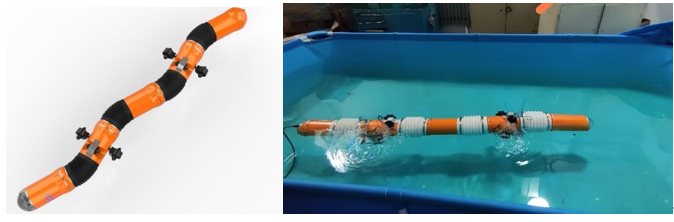
(B) Multi-joint high-mobility modular robot platform for submarine inspection task (the first set in China)
In view of the characteristics of many obstacles and seaweeds in the submarine environment, a multi-joint high-mobile modular robot platform for submarine reconnaissance missions is developed, and the basic principles and key technologies are verified. The robot is designed to reach the depth of 50 meters, and the technology can extend the depth to 1,000 meters.

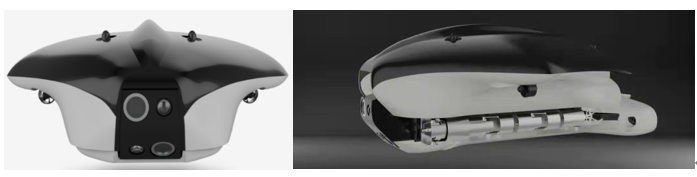
(C) Development of Underwater Robot Platform for Water Operation Tasks (first set in China)
According to the task characteristics of the seabed sampling, detection and maintenance, the underwater robot platform for the submarine operation structure is developed. The robot can reduce the water resistance of the water movement by changing the structure, and also increase the stability of the robot in the water operation. The robot is designed to reach the depth of 50 meters, and the technology can extend the depth to 1,000 meters.

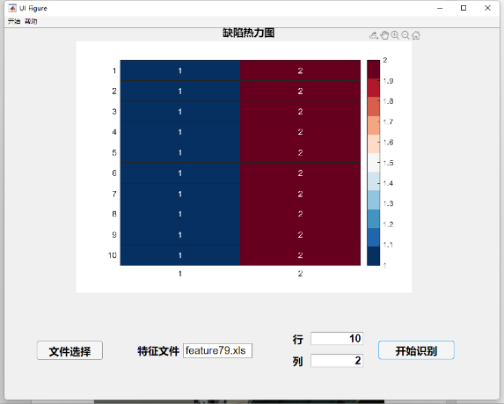
3. Application and Integration of Smart Factory Robots
The research group undertake the key technology of several central enterprises joint research projects, including pipeline detection robotics, steel parts defect location accurate positioning and marking technology, billet defect location precise positioning and grinding technology, multilayer complex structure material defect ultrasonic detection and processing display technology research, super long object handling task of robot collaborative handling technology, etc.



Pipeline detection robot for steel pipe production line testing application (the first set in China)


Portable ultrasonic pipe defect detector (the first set in China)


Intelligent robot of precision location and Marking of billet defect (first set in China)
\

Intelligent robot of precision location and grinding of billet defect (first set in China)


Intelligent pilot scale equipment with head and tail of high wire coil (first set in China)
4. Bionic Robot
According to the needs of rehabilitation training of patients with hand disabilities, an underdriven exoskeleton glove was developed, which stimulates the opening and closing of the gloves through brain waves, and realizes the movements such as grasping, grasping, pinching and unfolding.

Development of exoskeleton gloves based on bionic technology
5. Indoor Mobile Robots
(A) Unmanned Duty Robot System of the Archives
According to the needs of archives management in archives, the unattended robot system is developed to realize the archives access, classification, transportation and other operations.

(B) Service Robot
Cooperative robot: the robot consists of mobile chassis, robotic arm, Lidar and RGBD camera. It has the functions of map building by Lidar or RGBD camera, autonomous navigation, object grasping and placement, human-machine voice interaction and more. After the navigation target point is set, the moving chassis with the robotic arm can realize object recognition and capture, and then deliver the target object to the destination.





(C) Multi-robot Collaborative Research
According to the actual demand of ultra-long object handling, the research of multi-robot cooperative handling technology is carried out.


6、 Explosion-proof Robot in Explosive Gas Environment
According to the actual requirements of natural gas pipeline station inspection, underground workshop inspection of coking plant, and regular inspection of abandoned coal mine, the inspection robot suitable for class I and II explosive gas environment is designed.
|
|
Natural gas pipeline station inspection robot | Environmental inspection robot for underground workshop of coking plant |

